人とロボットの衝突回避
工場現場では、複数の作業工程を一箇所に集約することで作業効率を高めることが求められます。 現在の工場ではロボットは安全のため柵で囲われることが普通ですが、 作業効率を高めるためには人と作業空間を共有して近距離で作業を行う必要があります(図1)。 そこで私達は、人とロボットが作業空間を共有する場面において、 人とロボットの衝突を回避する技術を研究しています。
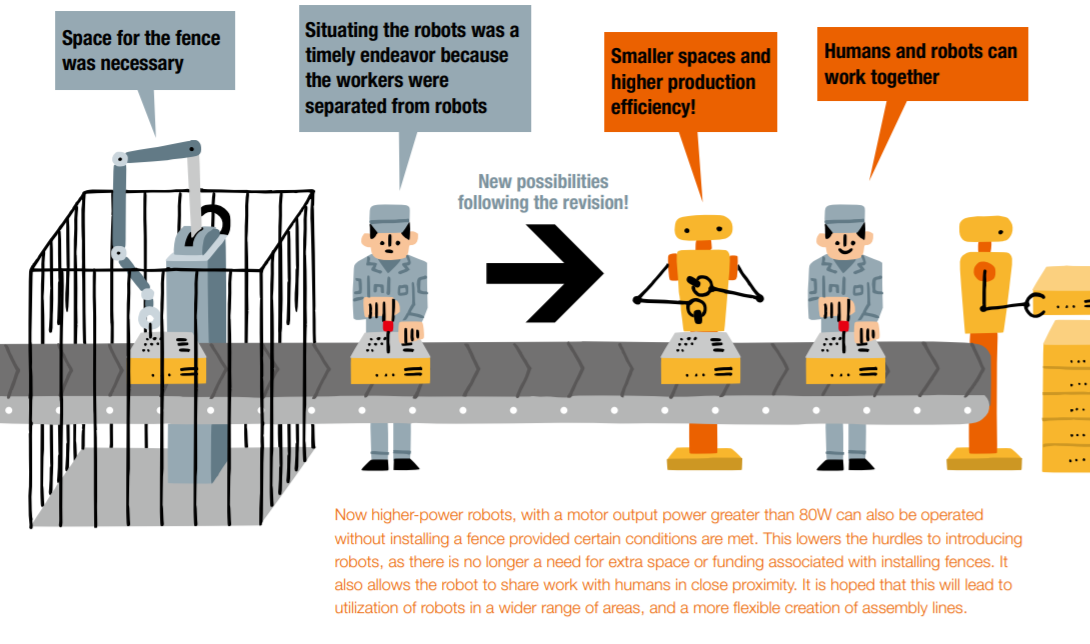
図1 次世代工場とロボット [1]
図2は工場における作業環境を模擬した実験設備です。中央に6軸のロボットアームを配置し、 その周囲に作業台を配置しています。測距センサにより作業者の動作を計測します。

図2 実験設備 [2]
図3は人工知能を用いて作業者の動きを予測した結果です。 8秒付近から先の予測結果(点線)と実測結果(実線)が良く一致していることが分かります。 これは、8秒付近において人工知能はその後に起こる作業者の動きを良く予測できたことを示しています。 人工知能による予測を用いることでロボットは作業者を避けながら効率的に作業を行うことができました[3]。
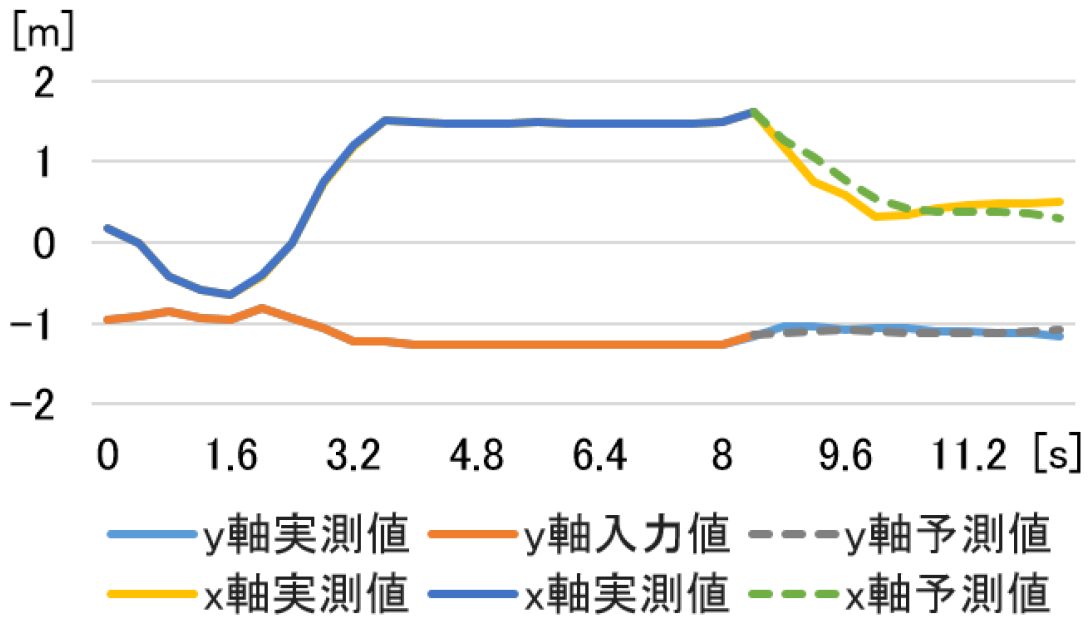
図3 実験結果 [3]
[1] 経済産業省, "METI Journal 経済産業ジャーナル," (2014).
[2] 佐藤葉介, 諏訪光輔, 金天海(岩手大学), 出澤純一, 菅原志門, 菅原康弘(株式会社AISing), 和田智博, 坂本義弘, 菅野重樹(早稲田大学), 寧霄光, 赤木哲也, 太田康裕(オムロン株式会社):"人とロボットの協調作業における人の移動する軌道の予測手法," 情報処理学会全国大会予稿集, (2019).
[3] 和田智博, 亀﨑允啓, 坂本義弘, 菅野重樹(早稲田大学), 佐藤葉介, 金天海(岩手大学), 寧霄光, 赤木哲也(オムロン株式会社), 出澤純一, 菅原志門(株式会社AISing):"安全性と生産性を両立するためのロボットマニピュレータの軌道選択," ロボット学会学術講演会予稿集, (2020).