인간과 로봇의 충돌 회피
공장현장에서는 여러 작업공정을 한곳에 집약함으로써 작업효율을 높이는 것이 요구되고 있습니다. 현재 공장에서 로봇은 안전을 위해 울타리로 둘러싸이는 것이 보통이지만, 작업효율을 높이기 위해서는 인간과 작업공간을 공유하고 근거리에서 작업을 수행해야 합니다 (그림 1). 우리는 인간과 로봇이 작업공간을 공유하는 장면에서 양자의 충돌을 방지하는 기술을 연구하고 있습니다.
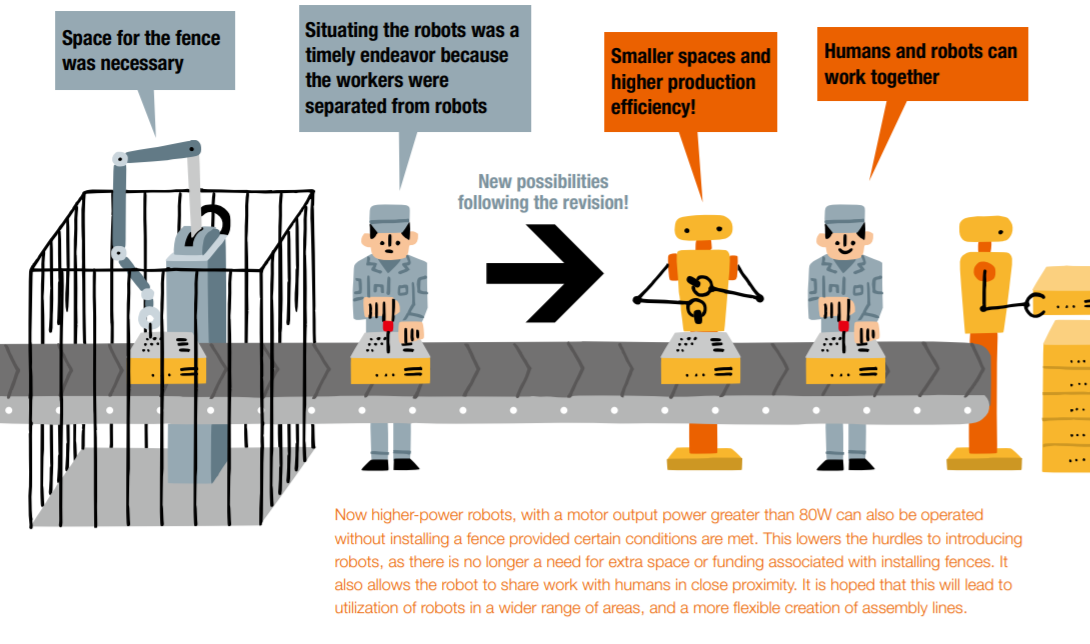
그림1 차세대공장과 로봇 [1]
그림2는 공장의 작업환경을 모의한 실험시설입니다. 중앙에 6축로봇팔을 놓고 그 주변에 작업대를 배치하고 있습니다. 거리측정센서로 작업자의 동작을 측정합니다.

그림2 실험설비 [2]
그림3은 인공지능을 이용하여 작업자의 움직임을 예측한 결과입니다. 8초 부근 이후에서 예측결과(점선)와 실측결과(실선)가 잘 일치하고 있음을 알 수 있습니다. 이것은 8초 부근에서 인공지능은 그 후에 일어나는 작업자의 움직임을 잘 예측할 수있는 것을 보여줍니다. 인공지능에 의한 예측을 이용하여 로봇은 작업자를 피하면서 효율적으로 작업할 수 있었던 것입니다[3].
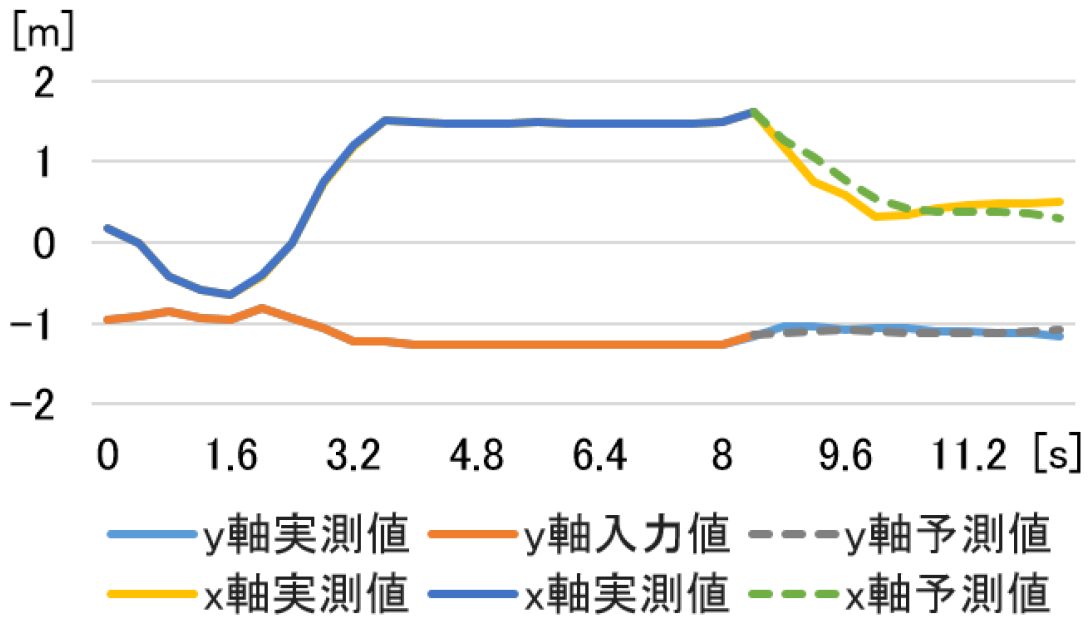
그림3 실험결과 [2]
[1] 経済産業省, "METI Journal 経済産業ジャーナル," (2014).
[2] 佐藤葉介, 諏訪光輔, 金天海(이와테대학), 出澤純一, 菅原志門, 菅原康弘(주식회사 에이싱), 和田智博, 坂本義弘, 菅野重樹(와세다대학),
寧霄光, 赤木哲也, 太田康裕(오므론 주식회사):"人とロボットの協調作業における人の移動する軌道の予測手法," 情報処理学会全国大会予稿集,
(2019).
[3] 和田智博, 亀﨑允啓, 坂本義弘, 菅野重樹(와세다대학), 佐藤葉介, 金天海(이와테대학), 寧霄光, 赤木哲也(오므론 주식회사),
出澤純一, 菅原志門(주식회사 에이싱):"安全性と生産性を両立するためのロボットマニピュレータの軌道選択," ロボット学会学術講演会予稿集,
(2020).