Human-Robot Collision Avoidance
At the factory site, it is required to improve work efficiency by consolidating multiple work processes in one place. In order to improve work efficiency further, robots need to share their work spaces with workers (Fig. 1), altough they are usually fenced for safety in today's factories. Therefore, we are researching collision-avoidance technology between humans and robots in shared work spaces.
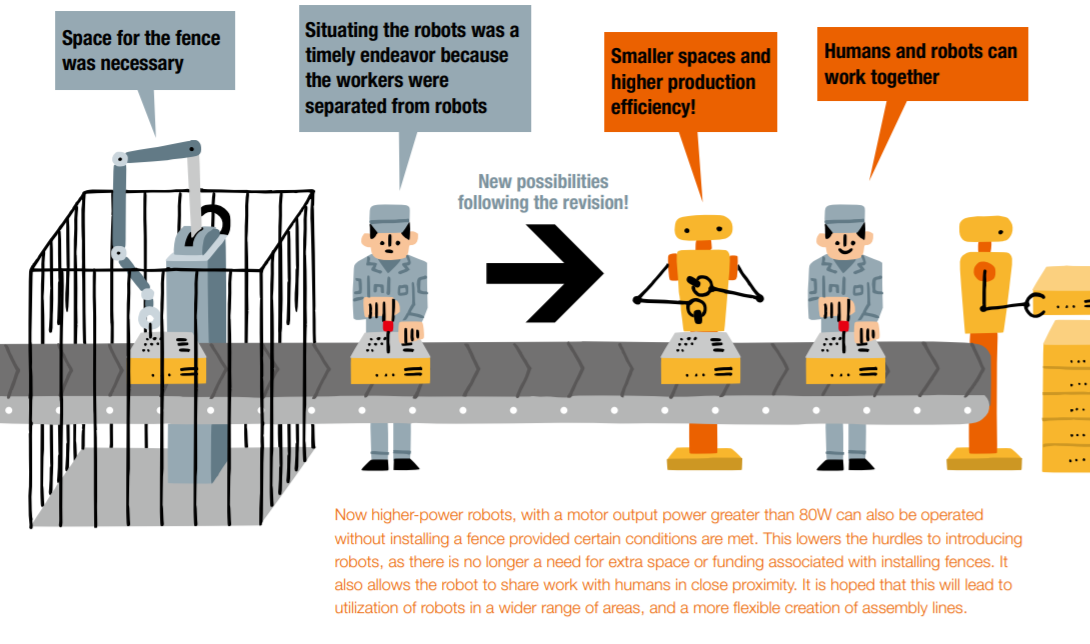
Fig. 1 Next Generation Factory and Robot [1]
Figure 2 shows an experimental facility that simulates the working environment in a factory. A 6-axis robot arm is placed at the center, and workbenchs are placed around it. The movement of the worker is measured by the distance measuring sensor.

Fig. 2 Experimental Facility [2]
Figure 3 shows the prediction results for the movement of workers using artificial intelligence. The prediction result (dotted line) and the actual measurement result (solid line) from around 8 seconds onward were in good agreement. This shows that artificial intelligence was able to predict the subsequent movements of the workers around 8 seconds. By using artificial intelligence prediction, robots were able to work efficiently while avoiding workers [3].
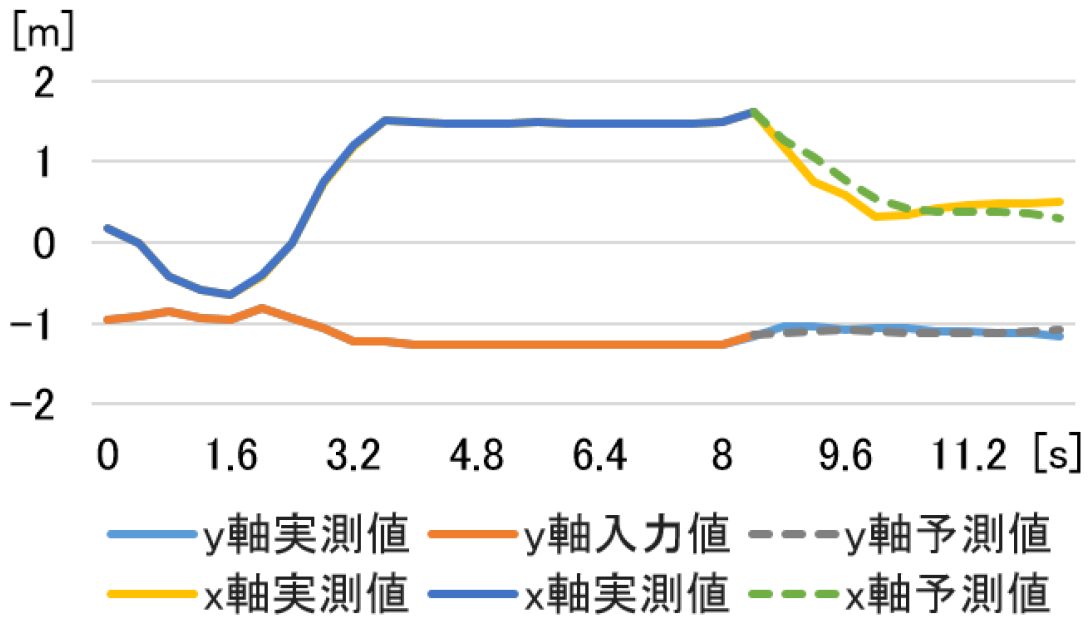
Fig. 3 Experimental Result [3]
[1] 経済産業省, "METI Journal 経済産業ジャーナル," (2014).
[2] 佐藤葉介, 諏訪光輔, 金天海(Iwate University), 出澤純一, 菅原志門, 菅原康弘(AISing Ltd.), 和田智博, 坂本義弘, 菅野重樹(Waseda University), 寧霄光, 赤木哲也, 太田康裕(OMRON Corporation):"人とロボットの協調作業における人の移動する軌道の予測手法," 情報処理学会全国大会予稿集, (2019).
[3] 和田智博, 亀﨑允啓, 坂本義弘, 菅野重樹(Waseda University), 佐藤葉介, 金天海(Iwate University), 寧霄光, 赤木哲也(OMRON Corporation), 出澤純一, 菅原志門(AISing Ltd.):"安全性と生産性を両立するためのロボットマニピュレータの軌道選択," ロボット学会学術講演会予稿集, (2020).